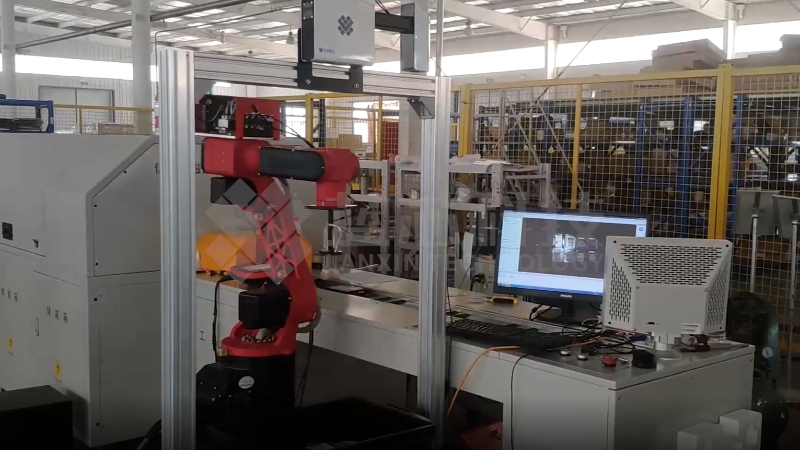
1、入庫方式は手作業によるロード:通い箱の中の製品がピックアップされた後、システムはプロンプトを出し、人の手で入庫バスケットを交換。
2、ロボットアームがそれを拾ってコンベアラインのシュートに載せ、コンベヤは一度停止して、載せ終わるのを待って回転を再開。
3、ロボットアームが一サイクルを7秒前後で往復させ、視覚処理時間を加えて合計8~9秒のサイクルで動作。